We present the rendered novel view video and pose estimation results. The experimental results demonstarte that our method can effectively deblur images, render novel view images and recover the camera motion trajectories accurately within exposure time.
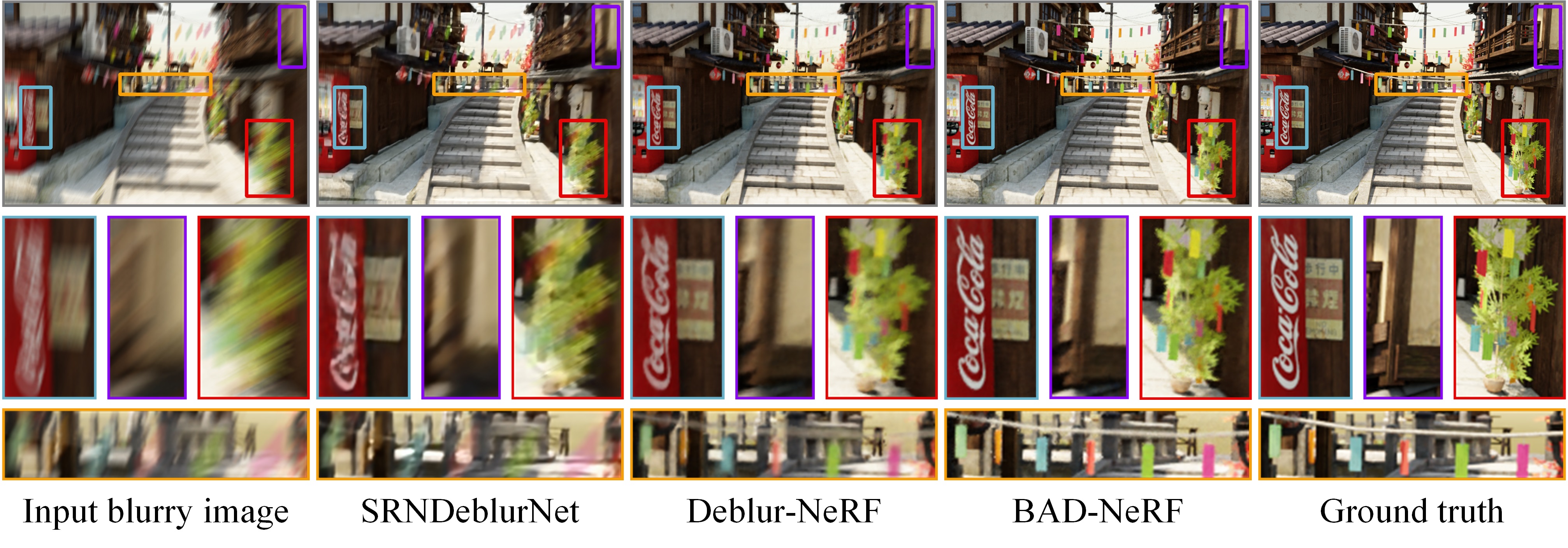
BAD-NeRF delivers superior novel view synthesis performance over prior methods when input images are motion blurred.
Qualitative Comparisons of estimated camera poses on Deblur-NeRF dataset. These are results on Cozy2room, Factory, Pool, Tanabata and Trolley sequences respectively. The results demonstrate that BAD-NeRF delivers reasonable camera pose estimations and performs better than both COLMAP and BARF.